1 Discriminatively Trained And-Or Graph Models for Object Shape Detection (2014)
可参考的点:与或图的训练
1.1 Introduction
本文研究一种 reconfigurable part-based model,即 与或图模型,用于识别图像中的物体形状。
该模型通过弱标注训练数据(即不对物体部分进行标注)进行判别性训练。
与或图模型:关键组成部分是“switch variable”( 或节点),它引入了 组合替代方案,使模型具有可重构性。具体而言,or-节点通过激活子节点来确定组合方式。与或图模型由以下四层构成:
- 叶节点位于底部,代表一批局部分类器,用于检测物体的显著轮廓片段。每个叶子节点在一个划分的块内定义。
- 定义为 开关变量 (switch variable) 的 或节点 (or-nodes) 指定其子叶节点的激活。在检测过程中,每个 或节点 激活其子叶结点之一,并选择被激活叶结点检测到的轮廓片段。因此,或节点 表示物体形状的部件,而 叶结点捕捉所有的局部变异性。
- 协作边(collaborative edges)用于在形状轮廓之间引入上下文信息,这些边由叶子节点之间的水平连接表示。论文的方法借鉴了上下文化目标检测(contextualized object detection)的方法【5, 40】,利用信息量丰富的空间布局特征来定义这些边,从而更有效地建模形状轮廓之间的关系。
- 与节点 (and-nodes) 用于聚合通过or-节点选择的局部形状轮廓。每个and-节点被定义为一个势函数(potential function),用于捕捉整体形状的变形和畸变。当轮廓片段被局部化后,and-节点进一步整体验证它们,从而提高模型的判别能力。
最顶层的根节点充当其子 与节点 的开关,考虑到 大的全局变化(例如不同视角下的形状)。其定义与 或节点 完全相同。
例如,两匹马在不同视角下可能会表现出不同,模型可以自适应地激活不同的 and-notes 来检测它们。
从底部到顶部,模型分层构建成一种 "And-Or-And-Or" 结构。请注意,模型中的叶节点也可以视为 and-nodes,因为它们的定义方式相同。该结构非常具有表现力,且通用。"And" 符合表示子部分的组合,而 "Or" 符号表示可能配置之间的切换。
引入 隐变量 使得模型可重构。特别地,隐变量 包括 or-nodes 和 root-nodes 的激活状态,以及轮廓片段的位置,叶节点和 与节点 被定义为 分类函数,其系函数被视为 可观察的模型参数。
通过 隐变量,图节点和边被明确映射为我们模型的可区分分类函数。
与或图模型的训练 是本工作另一个创新。挑战主要在于两个方面:首先不同层的多个参数需要与隐变量一起优化,而优化的目标函数是非凸的,不能直接使用传统方法(如支持向量机)求解。其次,在模型学习中自动发现模型结构并不是一件简单的事情,因为训练样本中没有标注对象部分。
- 在文献中,学习 And-Or 图模型通常依赖于详细的注释或初始化。
为了应对这两个问题,论文提出一种新颖的学习方法,称为动态结构优化 (Dynamical Structural Optimization, DSO),该算法迭代优化模型结构以及多层参数学习,包括三个主要步骤:
- 在训练样本上应用当前模型,同时为每个样本估计隐变量
- 发现新的模型结构。(对不同节点的子特征向量进行聚类,并根据聚类结构生成新结构,例如,在形状的某一部分,如果相应的子特征向量被聚类为三个组,则我们相应创建三个节点以检测局部轮廓)。
- 使用新生成的结构学习模型参数。
使用 And-Or 图模型进行形状检测是通过在图像金字塔上搜索实现的。我们首先完成两个测试步骤以生成多个检测假设,每个假设表示由检测到的轮廓片段组成的配置。
- 局部测试使用所有叶节点检测边缘图中的轮廓片段。
绑定测试对轮廓片段之间施加协同边缘,以进一步权衡假设。
之后,与节点 通过整体测量轮廓片段重新评分每个假设。根节点 通过选择最可能的假设来决定最终检测结果。
1.2 And-Or Graph Model
论文提出的模型以 与或图 的形式定义为 $\mathcal G = (\mathcal V, \mathcal E)$ ,其中 $\mathcal V$ 包含四个层级的节点,$\mathcal E$ 包含图的边。
- 根节点索引为 0,表示在不同形状视图之间的切换。
- 与节点的索引为 $r = 1, \dots, m$,每个代表一个全局分类器。对于每个与节点,有若干个 $z$ 或节点以 $b_1\times b_2$ 块的布局排列,以表示多个对象部件。
- 所有或节点索引为 $j = m+1, \dots, (z+1)*m$ 。
- 第四层中的叶节点的索引为 $i = (z+1)*m+1, \dots, (z+1)*m+1+n$,其中 $n$ 是叶节点的数量。
为了简化符号,我们定义 $m' = (z+1)*m + 1$,$n' = (z+1)*m + 1 + n$,并且 $i\in ch(j)$ 表示节点 $j$ 的子节点。模型 $\mathcal G$ 的细节如下所述。
叶节点:每个叶节点 $L_i$ 是用于检测部分形状轮廓的局部分类器。我们将叶节点 $L_i$ 的位置表示为 $p_i$ ,该位置由其父或节点决定。给定提取的边缘图 $X$,我们将观察到的块中的轮廓片段视为 $L_i$ 的输入。对于轮廓 $c$,我们用所提出的轮廓描述符表示特征向量 $\phi^l(p_i, c)$ 。位于 $p_i$ 的分类器 $L_i$ 的响应定义为:
$$ R_i^l(X, p_i) = \max_{c\in X} w_i^l\cdot \phi^l(p_i, c), $$
其中 $w_i^l$ 是一个参数向量,如果对应叶子节点的 $L_j$ 不存在,则该向量设为零。因此,我们可以通过 $c_i = \arg\max_{c\in X} w_i^l \cdot \phi^l(p_i, c)$ 来定位表示形状部分的轮廓。该部分检测方案能够从杂乱的背景中划分出真实物体的轮廓。
或节点:或节点 $U_j, j = m+1, \dots, (z+1)*m$ 指定其一个子叶节点,以及由该叶子节点检测到的轮廓。每个或节点可以相对于根节点稍微扰动其位置,以捕捉部件间的形变。对于每个或节点 $U_j$,我们定义形变特征 $\phi^s(p_0, p_j) = (dx, dy, dx^2, dy^2)$,其中 $(dx, dy)$ 编码了或节点位置 $p_j$ 相对于根节点确定的预期位置 $p_0$ 的位移。在 $p_j$ 处定位 $U_j$ 的成本为:$D_j(p_0, p_j) = w_j^s\cdot\phi^s(p_0, p_j) $,其中 $w_j^s$ 是与 $\phi^s (p_0, p_j)$ 相对应的 4维参数向量。
⭐对于与 $U_j$ 相关联的每个叶节点 $L_i$,我们引入一个指示变量 $v_i \in \{0, 1\}$,表示它是否被 $U_j$ 激活。我们还为 $U_j$ 定义一个辅助向量 $\mathbf v_j = \{v_i\}_{i\in ch(j)}$ ,其中 $\|\mathbf v_j\| = 1$ 或 $0$ 。$\| \mathbf v_j\| =1$ 仅在 $U_j$ 下的一个叶节点被激活时成立。通过这种方式,或节点可以自适应地激活不同的叶节点,以捕捉多样的局部形状方差。
因此,或节点 $U_j$ 的响应被定义为:
$$ R_j^u(X, p_0, p_j, \mathbf v_j) = \sum_{i\in ch(j)} R_i^l(X, p_j)\cdot v_i - D_j(p_0, p_j) $$
与节点:与节点 $A_r$ 对整个形状执行全局验证。对于每个与节点,我们有一组轮廓片段 $C_r = \{c_1, c_2, \dots, c_z\}$ ,这些片段由其子或节点确定。然后,我们采用形状上下文描述符将这些轮廓整体描述为 $\phi^a(C_r)$ 。因此,我们将与节点定义为:
$$ \mathcal R_r^a(C_r) = w^a\cdot \phi^a(C_r) $$
其中 $w^a$ 是相应的参数向量。
协作边(collaborative edges):我们基于协作边 施加 形状部分 之间的 上下文交互。给定与同一 与节点 关联的两个不同的或节点,我们在它们之间连接一条边,并且它们的子叶结点会继承该边。我们使用上下文特征来定义协作边缘。
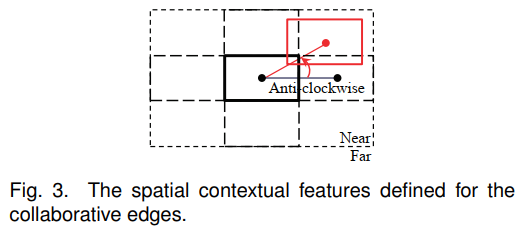
假设一条边连接两个叶节点 $(L_i, L_{i'})$ ,它们分别位于 $p_i$ 和 $p_{i'}$ 。根据它们的空间布局为两个叶节点收集一个 4-bin 特征 $\psi (p_i, p_{i'})$ ,$\psi(p_i, p_{i'})$ 的每个 bin 表示 $(L_i, L_{i'})$ 的四种关系之一:顺时针、逆时针、接近和远离。在图3中,中心的粗矩形表示 $L_i$ 的位置,它和表示 $L_{i'}$ 的红色矩形连接。虚线代表两个叶节点的初始布局,红色实线是根据观察调整得到的真实布局。
定义 $\{\mathbf v_j\}$ 表示叶节点的激活变量,使用 P 表示所有或节点 $U_j$ 的位置向量。P 还指定了 激活叶节点的位置 $\{p_i\}$ 。协作边的响应被参数化为
$$ \mathcal R_r^e(P, \{\mathbf v_j\}) = \sum_{j\in ch(r)}\sum_{i\in ch(j)}\sum_{i'\in \partial(i)} w_{(i, i')}^e \cdot \psi(p_i, p_{i'})\cdot v_i\cdot v_{i'} $$
其中 $\partial(i)$ 表示 $L_i$ 的邻接叶结点,每个邻居和 $L_i$ 有一个不同的父节点。$w_{(i, i')}^e$ 是相应的权重。$v_i$ 和 $v_{i'}$ 是 $L_i$ 和 $L_{i'}$ 的激活指示符,因为边仅对激活的叶结点施加。
根节点:顶部的根节点交替激活其子和节点,其定义与节点的定义类似。此外,我们使用变量 $v_r \in\{0, 1\}$ 来指示每个和节点 $A_r$ 的激活状态,根节点的知识向量为 $\mathbf v_0 = \{v_r\}_{r=0}^m$ 且 $\|\mathbf v_0\| = 1$,即只选择一个子节点。
设 P 表示带有 或节点 的基于部分的 形变 (part-based deformation),$V = (\mathbf v_0, \{\mathbf v_j\})$ 表示与节点 和 或节点的选择,模型的整体响应定义如下:
$$ \mathcal R_G(X, P, V) = \sum_{r=1}^m v_r\cdot\left( \sum_{j\in ch(r)} \mathcal R_j^v (X,p_0, p_j, \mathbf v_j) + \mathcal R_r^e(P, \{ \mathbf v_j \}) + \mathcal R_r^a(C_r) \right) $$
该模型中,$H = (P, V)$ 为潜变量,在测试阶段将自适应地估计。上述公式的简化表示:
$$ \mathcal R_G(X, H) = w\cdot \phi(X, H) $$
其中,$\phi(X, H)$ 表示模型中所有节点和边的特征向量的拼接形式,$w$ 是所有与 $\phi(X, H)$ 对应参数的集合。
1.3 Inference
给定从图像中提取的边缘图 $X$,推理任务是在图像金字塔中,通过在检测窗口中滑动,检测出最优的轮廓片段。该检测过程是一个自底向上的节点激活搜索过程,在此过程中会生成多个假设,每个假设都对应一组检测到的轮廓片段的配置。我们通过最大化公式 $\mathcal R_G(X, H) = w\cdot \phi(X, H)$ 中定义的模型响应来验证假设并剪除不太可能的假设。
推理过程:
- 局部测试:使用所有叶节点(即局部轮廓分类器)来搜索边缘图 X 中的最优轮廓片段。
- 绑定测试:施加 协作边,进一步加权和过滤局部测试的假设。在每个假设中,每个或节点提出一个叶节点,任何两个来自不同或节点的叶节点之间都通过一条边相连。我们通过 潜在函数 来测量分数。
- 全局验证:应用与节点重新评分检测的假设。对于任何假设,获得一组轮廓,每个轮廓由一个或节点提出,整体评估这些轮廓。最后,根节点通过选择最大聚合分数来确定最佳检测。
1.4 AND-OR Graph Learning
- 将 与或图模型学习 表述为 模型结构和参数的联合优化任务。
论文提出一种 从 非凸优化问题扩展而来的新颖结构学习算法。该算法以动态方式优化目标:隐变量 $H = (P, V)$ 与参数学习 在每一步中迭代确定。
例如,通过调整隐变量,可以创建或移除新的叶结点,以更好地适应训练数据。
1.4.1 Optimization Formulation
假设我们有一组正负训练样本 $(X_1, y_1), \dots, (X_N, y_N)$ ,其中 $X$ 是边缘图,$y = \pm 1$ 是指示正负样本的标签。我们假设从 1 到 K 索引的样本是正样本,并且每个样本 $(X, y)$ 的特征向量为,
$$ \phi(X, y, H) = \begin{cases} \phi(X, H) & \text{if }y = +1\\ 0 & \text{if }y = -1 \end{cases} $$
其中 $H$ 表示隐变量,$\phi(X, H)$ 是 And-Or 图模型的整体特征向量。然后我们将 And-Or 图学习视为优化模型参数以及隐结构的过程,
$$ w = \arg\max_{y, H}(w\cdot \phi(X, y, H)) $$
我们进一步将该目标转化为 max margin 形式,
$$ \min_w \cfrac12\|w\|^2 + \lambda\sum_{k=1}^N [\max_{y, H}(w\cdot \phi(X_k, y, H) + \mathcal L(y_k, y, H)) - \max_H(w\cdot \phi(X_k, y_k, H))] $$
其中 $\lambda$ 是一个惩罚权重(经验性设定为 0.005),而 $\lambda(y_k ,y, H)$ 是损失函数。在我们的实现中,我们定义当 $y_k = y$ 时 $\mathcal L(y_k, y, H) = 0$,否则为 1。
由于目标的能量是非凸的,这使得它难以进行解析求解。在这项工作中,我们提出了动态结构优化方法(DSO),以基于凹凸程序(CCCP)方法迭代优化这一目标。
14.2 Dynamical Structural Optimization
根据 CCCP 方法,将目标函数转换为 凸 和 凹 形式,如下所示:
$$ \begin{aligned} & \min_w \cfrac12\|w\|^2 + \lambda\sum_{k=1}^N [\max_{y, H}(w\cdot \phi(X_k, y, H) + \mathcal L(y_k, y, H)) - \max_H(w\cdot \phi(X_k, y_k, H))]\\ & = \min_w[f(w) - g(w)] \end{aligned} $$
其中,$f(w)$ 表示前两个项,而 $g(w)$ 最后一项。假设 $w^t$ 是第 t 次迭代的解。下一个迭代的解 $w^{t+1}$ 可以通过对其施加以下约束来求解:
$$ \nabla f(w^{t+1}) = \nabla g(w^t) $$
⭐在训练过程中,模型参数 $w^t$ 和隐结构 $H^t$ 被迭代更新。为了发现模型结构,我们在每次迭代中增加一步,称为模型重构。模型结构与特征向量进行映射,在这一步中,从所有正训练样本的特征向量中,我们首先提取出对应于不同节点的子向量,然后分别对这些子向量进行聚类。接着,根据聚类结果,我们将这些子向量放回特征向量中来重新排列每个特征向量。因此,可以生成新的模型结构。
DSO方法从过以下三个步骤迭代执行:
- 估计训练样本的隐变量
- 重新构建模型结构
- 更新新结构的模型参数
2 Max Margin AND-OR Graph learning for parsing the human body (2008)
Max Margin AND/OR 图,最大边缘 AND/OR 图,用于将人体解析为各个部分并恢复其姿态。通过与或图表示人体及其各个部分,这是一种多层混合的马尔可夫随机场。我们使用 最大边缘学习 来对 与或图模型 的参数进行判别式学习。
2.1 The AND/OR Graph Representation
AND/OR 图的结构由图 $G = (V, E)$ 表示,$V$ 表示顶点集,$E$ 表示边集。
顶点集 $V$ 包含:OR 节点、AND 节点、叶节点。
这些节点具有位置、比例和方向等属性。
- 边集 $E$ 包含 定义拓扑结构的 垂直边 和 定义节点属性空间约束的 水平边。
- 对于每个节点 $\nu\in V$,其子节点 由 $T_\nu$ 定义,因此 $\{T_\nu\}$ 记为与或图的所有可能的垂直边。
- 水平边 定义在 AND节点 的子节点三元组 $(\mu, \rho, \tau)$ 上。
- AND/OR 图的结构由 $\{ (v, T_v, (\mu, \rho, \tau)) \}$ 表示。
- 与或图 的表示能力由该图的拓扑结构数量决定,我们称其为解析树,它对应于不同的姿态。
与或图的 configuration 是 每个节点的状态变量 $y = \{ z_\nu, t_\nu \}$ 的一种赋值
- $z_\nu = (z_\nu^x, z_\nu^y, z_\nu^\theta, z_\nu^s)$ ,$(z_\nu^x, z_\nu^y)$ 是位置,$z_\nu^\theta$ 是方向,$z_\nu^s$ 是尺度。
$t = \{t_\nu \}$ 定义 解析树 的特定拓扑结构,$t_\nu$ 是 $\nu$ 的子节点。
- AND节点的 子节点集 是固定的,因此 $t_\nu = T_\nu$ 。
- 每个 OR 节点 必须选择唯一的子节点 $t_\nu \in T_\nu$ 。
- 图的输入是在图像格点上定义的图像的 $x = \{x_\nu\}$ 。
状态和数据的条件分布由以下给出:
$$ P(y|x; \mathrm w) = \cfrac{1}{Z(x;\mathrm w)}\exp\langle\mathrm w, \Psi(x, y)\rangle $$
其中:$x$ 为输入图像,$y$ 为解析树,$Z(x, \mathrm w)$ 是配分函数,$\mathrm w$ 是模型参数(待学习),$\Psi(x, y)$ 为特征,。$P(y|x; \mathrm w)$ 是一个条件指数模型, 由 $\langle\mathrm w, \Psi(x, y)\rangle$ 定义。
特征 $\Psi(x, y)$ 有三种类型:
外观特征 $\Psi^D(x, y)$
- 外观特征 $\Psi^D(x, y), ∀ \nu \in V^{LEAF}(t)$ 依赖于数据,建模了 物体的外观,将活跃的 叶节点 的外观和 局部图像的属性 关联。
- 更正式地说,$\Psi^D(x, y)$ 中的 $y$ 指的是 活跃节点 $\nu\in V$ 的 $z_\nu = (z_\nu^x, z_\nu^y, z_\nu^\theta, z_\nu^s)$ 。
- $\Psi^D(x, z_\nu)$ 代表局部图像特征,包括:灰度强度,梯度、Canny 边缘图、不同尺度和方向的 Gabor 滤波器响应以及相关特征。
水平空间关系特征 $\Psi^H(y)$
- 对应于 不同尺度下的 几何约束。
- 定义:$\Psi^H(y) = g(z_\mu, z_\rho, z_\tau), ∀\nu \in V^{AND}(t)$ ,$g(\cdot, \cdot, \cdot)$ 是基于节点 $\nu$ 的三个子节点 $z_\nu, z_\rho, z_\tau$ 构建的 invariant shape vector $l(z_\mu, z_\rho, z_\tau)$ 的对数高斯分布。该 shape vector 仅取决于三元组的变量,例如 内部角度,这些变量对于三元组的平移、旋转和缩放是不变的。这种类型的特征定义在每个父节点的子节点所形成的三元组上。高斯分布的参数是从 有标签 的训练数据中估计出来的。
垂直关系特征 $\Psi^V(y)$
- 通过将 父节点的状态 与 其子节点的状态 相关联 来保持结构的完整性。
$\Psi^V(y)$ 根据 type(A)、type(B)、type(C) 的垂直连接 单独拆分为 三个垂直能量项 (vertical energy terms),分别记为 $\Psi^{V, A}(y), \Psi^{V, B}(y), \Psi^{V, C}(y)$ 。
- $\Psi^{V, A}(y)$ 规定了从 与节点 到 或节点 的耦合关系。这种耦合关系是确定性的,父节点的状态由子节点状态精确确定。定义:$\Psi^{V, A}(y) = h(z_\nu, \{ z_\mu \text{ s.t.}\mu \in t_\nu \}),∀\nu \in V^{AND}(t) $,$h(\cdot, \cdot) = 0$ 如果子节点的平均方向和位置和父节点的平均方向和位置。如果它们不相等,则 $h(\cdot, \cdot) = \kappa $,$\kappa$ 是一个小的负数。
- $\Psi^{V, B}(y)$ 表示从 或节点 到 与节点 的连接分配 的概率。定义:$\Psi^{V, B}(y) = \lambda_\nu(t_\nu), ∀\nu \in V^{OR}(t)$ ,$\lambda_\nu()$ 是 势函数 (potential function),它编码了 由 $t_\nu$ 定义的分配权重。
- 势函数 $\Psi^{V, C}(y)$ 定义了 最底层的与节点 到 叶节点 之间 的连接,定义:$\Psi^{V, C}(y) = h(z_\nu; z_{t_\nu})$ ,$h(\cdot, \cdot) = 0$ 如果子节点的平均方向和位置和父节点的平均方向和位置。如果它们不相等,则 $h(\cdot, \cdot) = \kappa $,$\kappa$ 是一个小的负数。
2.2 The Inference/Parsing Algorithm
- 计算 $y^* = \arg \max_y \langle \mathrm w, \Psi(x, y)\rangle$ 来获取图像 $x$ 的最佳解析树 $y^*$ 。
- 该算法有一个自底向上的阶段,用于提出 AND/OR 图配置的建议。这一过程通过将子配置的建议组合起来以构建更大配置的建议。对于 AND 节点,我们将子节点的建议组合起来,形成父节点的建议。对于 OR 节点,我们从所有分组中枚举所有建议,而不仅组合。为了防止组合爆炸,剔除较弱的建议。
推理算法
输入:$\{ MP_{\nu^1}^1 \}$
输出:$\{ MP_{\nu^L}^L \}$
循环:从 $l = 1$ 到 $L$,对层 $l$ 的每个节点 $\nu$ 执行以下操作:
如果 $\nu$ 是 OR 节点:
- 联合 (Union):$\{ MP^l_{\nu, b} \} = \cup_{\rho\in T_\nu, a = 1, \dots, M_\rho^{l-1} } MP_{\rho, a}^{l-1}$
如果 $\nu$ 是 AND 节点
- 组合 (Composition):$\{ P_{\nu, b}^l \} = \oplus_{\rho\in T_\nu, a = 1, \dots, M_\rho^{l-1} } MP_{\rho, a}^{l-1} $ ($\oplus$ 表示 结合两个提议 (proposals) 的操作)
- 剪枝 (Pruning):$\{ P_{\nu, a}^l \} = \{ P_{\nu, a}^l | \langle \mathrm w, \Psi_\nu (P_{\nu, a}^l) \rangle > Thres_l \}$
- 局部最大值:$\{(MP_{\nu, a}^l, CL_{\nu, a}^l)\} = \text{LocalMaximum}({P_{\nu, a}^l}, \epsilon_{W})$ ,$\epsilon_W$ 是 窗口 $W_\nu^l$ 的大小,定义在空间、方向和尺度上。
在层级 $l$ 的输入是一组 max-proposals $\{ MP_{\nu, a}^{l-1} \}$ ,其中每个 max-proposal 是 层级 $l-1$ 中节点 $\nu$ 的子树 configuration $\{ Z_{\nu, a}^{l-1} \}$ ,并并通过索引 $a$ 或 $b$ 进行标识。这些最大提议通过组合(若层级 $l$ 由 AND 节点构成)或联合(若层级 $l$ 包含 OR节点)的方式,生成层级 $l$ 节点的 proprosals $\{ P_{\mu, b}^{l} \}$
剪枝方式:提出适应度分数最低的 proposals,通过局部最大值聚类将 proposals 分组为若干簇 $\{ CL_{\mu, a}^l \}$,每个簇由一个 max-proposal $\{MP_{\nu, a}^l\}$ 表示(局部最大值基于空间位置、尺度、方向确定)。输出的 $\{MP_{\nu, a}^l\}$ 将作为下一层级的输入。
2.3 Max Margin AND/OR Graph Learning
- 与或图学习的任务,是从一组训练样本中估计参数 $\mathrm w$ ,这些样本是从某个固定但未知的概率分布中抽取的。在本文中,$x$ 表示图像,$y$ 表示 AND/OR 图的配置。
- 我们将此学习任务以 max margin 准则的形式来表述,该准则旨在学习最合适分类 (即估计 $y$) 的参数,而不是使用标准的极大似然准则。需要注意的是,这里的分类是在集合 $\mathcal Y$ 上进行的,该集合的规模是指数级的,因此与简单的二分类问题有显著差异。实际上, max margin 学习旨在找到参数 $\mathrm w$ 的值,确保能量 $\langle \Psi(x, y), w\rangle$ 在真实状态 $y$ 和接近真实状态的状态上最小。 max margin 学习的一个实际优势是它提供了一种计算上可行的学习算法(避免了计算分布的配分函数的需求)。
max margin 方法的主要思想是放弃公式1的概率解释:
$$ P(y|x; \mathrm w) = \cfrac{1}{Z(x;\mathrm w)}\exp\langle\mathrm w, \Psi(x, y)\rangle $$
转而专注于判别函数 $F(x, y, \mathrm w) = \langle \Psi(x,y),\mathrm w\rangle $。我们定义参数 $\mathrm w$ 在样本 $i$ 上的间隔 $\gamma$ 为真实解析 $y_i$ 与 最佳解析 $y^*$ 之间的差值:
$$ \begin{aligned} \gamma_i &= F(x_i, y_i, \mathrm w) - \max_{y\not=y_i}F(x_i, y, \mathrm w)\\ & = \langle \mathrm w, \Psi_{i, y_i} - \Psi_{i, y^*}\rangle \end{aligned} $$
其中,$\Psi_{i, y_i} = \Psi(x_i, y_i), \Psi_{i, y} = \Psi(x_i, y)$ 。
直观地说,间隔的大小量化了使用函数 $F(x, y, \mathrm w)$ 拒绝错误解析 $y$ 的置信度。较大的间隔能够带来更好的泛化性能并防止过拟合。
max margin AND/OR 图学习的目标是最大化最小间隔:
$$ \begin{aligned} \max_\gamma& \ \ \ \gamma\\ \text{s.t.}& \ \ \ \langle \mathrm w, \Psi_{i, y_i} - \Psi_{i,y}\rangle \geqslant \gamma L_{i, y}, ∀ y; \|\mathrm w\|^2 \leqslant 1; \end{aligned} $$
其中,$L_{i,y} = L(y_i, y)$ 是一个损失函数。损失函数的作用是为与真实状态仅有微小差异的状态提供部分奖励。
损失函数定义:
$$ L(y_i, y) = \sum_{\nu \in V_{AND}}\Delta (z_\nu^i, z_\nu) + \sum_{\nu\in V_{LEAF}} \Delta(z_\nu^i, z_\nu) $$
其中,若 $\text{dist}(z_\nu^i, z_\nu)\geqslant \delta$,则 $\Delta(z_\nu^i, z_\nu) = 1$,否则 $\Delta(z_\nu^i, z_\nu)=0$。$\text{dist}(\cdot, \cdot)$ 是两点间距离的度量,$\delta$ 是一个阈值。注意,求和是在活跃节点上进行的。
该损失函数通过累加各部分差异来计算两个解析树之间的距离/代价,确保其计算复杂度与层次结构中 LEAF 节点 和 AND 节点 的数量呈 线性关系。
通过标准变化,优化问题可以重新表述为 最小化带约束 的权重二次代价函数:
$$ \begin{aligned} \min_\mathrm w & \ \ \ \cfrac12 \|w\|^2 + C\sum_i \xi_i\\ \text{s.t.} & \ \ \ \langle \mathrm w, \Psi_{i, y_i}-\Psi_{i, y}\rangle \geqslant L_{i, y} - \xi_i, ∀y; \end{aligned} $$
其中,$C$ 是一个固定的惩罚参数,用来平衡间隔大小与异常值之间的权衡。异常值是指那些仅通过松弛变量 $\xi_i$ “移动”到间隔正确一侧才能被正确分类的训练样本。约束条件通过引入拉格朗日乘数 $\alpha_{i, y}$ (每个约束对应一个 $\alpha$)来施加。
该最小化问题的解可以表示为以下形式:
$$ \mathrm w^* = C\sum_{i,y}\alpha_{i,y}^* (\Psi_{i, y_i}-\Psi_{i, y}) $$
其中 $\alpha^*$ 是通过最大化对偶函数得到:
$$ \begin{aligned} \max_\alpha & \ \ \ \sum_{i, y} \alpha_{i,y} L_{i,y} - \cfrac12 C\sum_{i,j}\sum_{y,z} \alpha_{i,y}\alpha_{j,z}\langle\Psi_{i, y_i}-\Psi_{i, y}, \Psi_{j, y_i}-\Psi_{j, y}\rangle\\ \text{s.t.}& \ \ \ \sum_y \alpha_{i,y} = 1,∀i; \ \ \alpha_{i,y}\geqslant 0, ∀i,y; \end{aligned} $$
注意到,解仅依赖于那些满足 $\alpha_{i, y_i}\not= 0$ 的训练样本 $(x_i, y_i)$ ,这些样本被称为支持向量。它们对应于位于间隔上或需要松弛变量的异常值样本。支持向量的概念对于估计 $\alpha^*$ 的优化算法至关重要。
解仅通过势函数的内积依赖于数据。这使得我们可以利用核技巧,用核函数 $K(\cdot, \cdot)$ 替代内积。本文中,核函数 $K(\cdot)$ 采用两种形式:
- 线性核:用于图像特征 $\Psi^D$ ,定义为 $K(\Psi, \Psi') =\Psi\cdot\Psi'$ ;
- 径向基函数核:用于形状特征 $\Psi^H$ ,定义为 $K(\Psi, \Psi') = \exp(-r\|\Psi-\Psi'\|^2)$ ,其中 $r$ 是 RBF 的参数。
双重优化
- 优化对偶问题的主要问题在于 约束条件的数量呈指数级增长(因此需要求解的 $\{\alpha_{i,x}\}$ 也呈指数级增长)。这可能导致我们必须枚举所有可能的解析树 $y\in Y$,这对于 AND/OR 图来说几乎是不可能的。
实际应用中只需要少量的支持向量,这促使了工作集算法的出现,用于优化 对偶函数中的目标函数。
该算法旨在找到一个较小的活跃约束集,以确保得到足够精确的解。更确切地说,它通过切割平面依次创建一个嵌套的工作集,这些工作集 的松弛程度 逐渐减小。可以证明,剩余的(呈指数级数量的)约束条件的违反程度不会超过。无需将它们显式添加到优化问题中。
算法伪代码:
Loop over k:
- $y^* = \arg\max_y H(x_k, y)$ where $H(x_k, y) = \langle \mathrm w, \Psi_{i,y} \rangle + L(y_k, y)$ 。
if $H(x_k, y^*; \alpha) - \max_{y\in S_k} H(x_k, y; \alpha) > \varepsilon$
$S_k \leftarrow S_k \cup y^* $
$\alpha_s \leftarrow \text{optimize dual over } S, S = S\cup S_k$
- 推理算法在每个循环的第一步执行。因此,训练算法的效率很大程度上取决于推理算法的计算复杂度。因此,推理的效率使学习变得切实可行。
第二部是按顺序创建工作集,然后在工作集上估计参数 $\alpha$。对工作集的优化通过序列最小优化来完成。这涉及逐步满足用于强制执行约束条件的 KKT 条件。伪代码:
给定 训练集 $S$ 和 参数 $\alpha$
Repeat
- 选择不符合 KKT 条件的 一对数据点 $(y_j, y_k)$
- 在 $(y_j, y_k)$ 上求解优化问题。
直到所有数据点对都符合 KKT 条件。
3 A Numerical Study of the Bottom-up and Top-down Inference Process Processes in And-Or Graphs (2011)
在分层模型中,我们注意到某些节点,比如人脸,通常在层次结构中以自上而下的方式解释。之所以这样做,是因为检测完整的人脸比检测单个面部组件要有效得多。
相反,一些其他节点,比如连接点和手写体,则在层次结构中以自下而上的方法解释更为有效。例如,直接检测矩形非常困难。相反,我们可以先检测平行线或 L 型连接点,然后根据一些明确的约束条件将那些兼容的平行线或兼容的 L 型连接点绑定在一起。同时,如果考虑到尺度和遮挡情况,可能需要针对不同的情况采用不同的计算策略。
图1展示了三种人脸情况:第一种情况是正常情况,人脸处于中等分辨率且无遮挡;第二种情况中人脸处于较高分辨率但有遮挡;第三种情况中人脸处于极低分辨率。直观来看,这三种情况需要三种不同的推理过程。
一些问题自然就产生了:
- 在层级模型中,对于节点而言,可以识别出哪些自下而上和自上而下的推理过程?
- 他们每个人为不同的节点贡献了多少信息?
- 应如何将它们整合起来以提高检测性能?
在本文中,我们提出一个框架来研究这三个问题。选择与或图来作为分层模型。首先,我们为 AoG 中的每个节点 A 确定了三种推理过程,分别称为 $\alpha(A), \beta(A), \gamma(A)$ 过程,这三种过程分别对应节点 A 的三种情况。然后,通过缩放和遮蔽节点 $A$ 的图像块,我们可以分别隔离并训练这三种过程,并通过计算机和人类分别评估它们的信息贡献。
此外,我们明确地整合这三种过程以实现稳健的推理,并在贝叶斯框架下提出了一种贪婪追踪算法用于对象解析。在实验中,我们选择了两种分层情况进行研究,一种是低到中层视觉连接点和矩形,另一种是高层视觉中的人脸。我们观察到:
- $\alpha(A), \beta(A), \gamma(A)$ 过程的有效性取决于尺寸和遮挡条件;
- $\alpha(\text{face})$ 过程比其子节点和父节点的 $\alpha$ 过程更强,而 $\beta(\text{junctions})$ 和 $\beta(\text{rectangle})$ 的效果远好于它们的 $\alpha$ 过程;
- 这三个过程的整合在 ROC 比较中提供了性能。
AoG 概述以及 $\alpha$、$\beta$ 和 $\gamma$ 流程
AoG 表示法
- 一个 AoG 能够代表某一对象类别的所有结构、几何、外观和概率信息。
- AoG 中有三种类型的节点:代表分解的与节点、代表 替代结构的或节点 以及 连接到图像数据的终端节点。
- AoG 中的每个与节点也可以直接连接到图像数据,以考虑缩放效应。
考虑 AoG 节点 A:
$\alpha$ 过程,节点 A 可以直接且单独地被检测到,而其子节点或部分在裁剪的图像块中无法单独识别。
计算机视觉文献中大多数滑动窗口检测方法都属于这一过程。
- $\beta$ 过程,在裁剪的图像块中可以识别出节点 A 的部分子节点,而节点 A 本身由于遮挡等原因无法单独识别
- $\gamma$ 过程,由于分辨率较低,节点 A 无法单独识别,其组成部分也无法单独识别。大多数基于上下文的方法。
对于节点 A,$\alpha(A)$ 、$\beta(A)$ 和 $\gamma(A)$ 这三个推理过程都对检测有贡献。每个过程的有效性取决于尺度和遮挡条件。
为了实现推理,应该将它们整合起来。AoG 是一种递归结构。因此,这三个推理过程也是递归定义的,并且每个与节点都有自己的 $\alpha$、$\beta$ 和 $\gamma$ 推理过程。
3.1 用于对象表示的 AoG 以及 $\alpha$、$\beta$ 和 $\gamma$ 推理过程
一个 AoG 体现了一种随机图像语法,并由四元组表示:$\mathcal G = (V_N, V_T, E, \mathcal P)$
- $V_N = V_{and}\cup V_{or}$ 是一个非终结点集
- $V_T$ 是一组终端节点。在 AoG 中,$V_T$ 和 $V_{and}$ 存在一一对应关系。每个 And 节点通过一个终端节点与图像数据连接。终端节点用小写字母表示。
每个 或节点 $O$ 都有一个切换变量,表示其分支出现的频率,记作 $p(A|O)$ 。而 “与”节点和终端节点 ($A\in V_{and}$)分别具有由 $X(A)$ 和 $X(t)$ 表示的属性向量。对于子集 $v\subset V_{and}$ ,用 $X(v)$ 表示子集 $v$ 中 And 节点的属性串联。
属性通常包括有关位置、规模、方向等方面的信息。
And 节点的属性可以从以下途径传递:(1) 直接从对应终端节点传递 (2) 在绑定过程中从 子And节点传递 (3) 在预测过程中从父节点传递。
$E = E_{or} \cup E_{dec} \cup E_t\cup E_{rel}$ 是包含四种类型的边的集合。
- $E_{or}$ :垂直切换边
- $E_{dec}$ :垂直分解边
- $E_t$ :垂直终止边
- $E_{rel}$ :一组水平关系边,连接同一层的与节点,通常为成对连接
- $P$ 是定义在所有有效解析图空间上的概率,其定义如下。
解析图 Parse graph:解析图 $pg$ 是通过在 或节点处选择变量,并为出现的 与节点 指定属性而从 $G$ 中选取的一个实例。
$pg = (V_N^{pg}, E^{pg}, p(pg))$
其中 $V_N^{pg} = V_{and}^{pg}\cup V_{or}^{pg}$ ,$V_N^{pg}\subset V_N$ ,$E^{pg} = E_{or}^{pg} \cup E_{dec}^{pg}\cup E_{rel}^{pg}$ ,$E^{pg}\subset E$
解析图是基于并对应于一种配置 configuration 构建的。
$p(pg)$ 是解析图 $pg$ 的先验概率,用于衡量每条切换边$<O, A> \in E_{or}^{pg}$ 出现的概率,以及 And节点属性之间的兼容性概率,这些 And节点属于 $V_{and}^{pg}$,并通过垂直分解边 $<P, A>\in E_{dec}^{pg}$ 或水平关系便 $<C_i, C_j>\in E_{rel}^{pg}$ 连接。因此,可以得到:
$$ p(pg) = \prod_{<O, A>\in E_{or}^{pg} } p(A|O) \times \prod_{<P, A>\in E_{dec}^{pg}}p(X(P), X(A))\times \prod_{<C_i, C_j>\in E_{rel}^{pg}}p(X(C_i), X(C_j)) $$
配置 Configuration:一个配置 $\mathcal C$ 是从有效的解析图 $pg$ 压缩得到的平面空间布局中的一组终端节点。
$$ \mathcal C = \{ (t, x(t)): t\in V_T^{\mathcal C} \} $$
其中 $V_T^{\mathcal C} (\subset V_T)$ 是从数据图像检测到的终端节点的集合。
- AoG 的推理过程是为图像中出现的每个对象实例构建解析图,其结构并非预先定义,而是即时推断得出。
$\alpha$、$\beta$ 和 $\gamma$ 过程及符号表示
在任意一个活动轮廓图 (AoG) 中,每个与节点 $A$ 都可以通过其 $\alpha$、$\beta$ 和 $\gamma$ 过程进行推断,这取决于尺寸和遮挡条件。
- $\alpha$ 过程直接基于中等分辨率的图像特征检测节点 $A$。$\alpha$ 过程可以被视为自下而上的推理过程。对于每个节点 $A\in V_{and}$ 相关的,用 $\alpha(A;\theta)$ 表示的 $\alpha$ 过程,由其在 $V_T$ 中耦合的终端节点实例化,其中 $\theta$ 是一组参数。
- $\beta$ 过程通过自底向上绑定在给定步骤中检测到的子节点来计算节点 A。$\beta$ 过程处理节点 A 处于高分辨率但具有不同程度遮挡的情况(遮挡会关闭 $\alpha(A)$ 过程)。令 $V_{and}^{ch}\subset V_{and}$ 为具有子节点的与节点的集合。对于每个节点 $A\in V_{and}^{ch}$ ,令 $ch(A)$ 为它的子节点的集合。节点 A 的 $\beta$ 过程记为 $\beta(A|\mathbf c; \phi)$ ,$\beta\subseteq ch(A)$ ,$\phi$ 是参数集合。给定不同的 $\mathbf c$ ,我们得到 $A$ 的不同的 $\beta$ 过程。
- $\gamma$ 过程通过自上而下的预测从其父节点来计算节点 A。$\gamma$ 过程处理节点 A 分辨率极低的情况,此时 $\alpha(A)$ 和 $\beta(A)$ 都不准确。令 $V_{and}^{prt}\subset V_{and}$ 是 拥有父节点的And节点的集合,$\gamma$ 过程记为 $\gamma(A|P; \varphi)$ ,$P$ 是给定父节点,$\varphi$ 是参数集合。
3.2 学习 $\alpha$、$\beta$ 和 $\gamma$ 过程
分隔 $\alpha$、$\beta$ 和 $\gamma$ 过程
(1) 隔离α(A)过程:通过阻断β(A)和γ(A)过程,可单独提取α过程。首先,根据标注内容将节点A的紧凑图像块从其上下文中裁剪出来。随后,对这些图像块进行降采样,直至达到某一尺度——在该尺度下,若单独裁剪局部区域,则无法识别其内容。
(2) 隔离β(A)过程:根据节点A的子节点集合c⊂ch(A)的不同,β(A)过程会有所差异。要隔离β(A|c)过程,需阻断α(A)和γ(A)过程,同时保留子节点c中的α过程。具体步骤为:先裁剪节点A的紧凑图像块,但仅保留分辨率高于预设值的图像块;接着将所有图像块缩放至相同尺寸(仍需高于预设值),并对不属于子集c的子节点所对应的图像区域进行掩码处理。
(3) 隔离γ(A)过程:γ过程可能因父节点P的不同而有所变化。隔离γ(A|P)过程需阻断α(A)和β(A)过程,同时保持α(P)过程激活。这相当于单独提取α(P)过程。具体操作为:先裁剪父节点P的紧凑图像块,再对这些图像块进行降采样,直至达到某一尺度——在该尺度下,若单独裁剪节点A对应的区域,则无法识别其内容。
通过上述隔离方法修改目标类别的测试图像数据集,可使现有大多数目标检测或识别方法失效。为实现鲁棒性能,我们首先对各过程分别训练,随后在数值研究中显式整合它们。
接下来,可基于此隔离流程为每个过程生成训练数据。
为 $\alpha$、$\beta$ 和 $\gamma$ 过程准备数据
(1) $\alpha$ 过程训练数据:用 $D_\alpha^+(A)$ 表示节点 A 的 $\alpha$ 过程正训练数据集,通过 $\alpha$ 过程的阻隔方法,对每张图像 $I_i\in D^+$,提取节点 A 的 $\alpha$ 图像块 $I_i^{(A)}$,得到:
$$ D_\alpha^+(A) = \{ I_i^{(A)}: i=1,2,\cdots, m \} $$
(2) $\beta$ 过程训练数据集:用 $D_\beta^+(A|c)$ 表示给定子节点集合 $c$ 时节点 $A$ 的 $\beta$ 过程正训练数据集,通过 $\beta$ 过程的阻隔方法,对每张图片 $I_i\in D^+$ ,提取子节点 c 对应的 $\beta$ 图像块 $I_i^{(c)}$ ,并附加从 $I_i^{(c)}$ 中提取的子节点属性拼接结果 $X(c|A, pg_i)$ (用于学习自底向上的绑定模型),得到:
$$ D_\beta^+(A|c) = \{ (I_i^{(c)}), X(c|A, pg_i)): i = 1,2,\cdots, m \} $$
(3) $\gamma$ 过程训练数据集:用 $D_\gamma^+(A|P)$ 表示给定父节点 $P$ 时节点 $A$ 的 $\gamma$ 过程正训练数据集。通过 $\gamma$ 过程的隔离方法,对每张 $I_i\in D^+$ ,提取父节点 $P$ 对应的 $\gamma$ 图像块 $I_i^{(P)}$ ,并附加从 $I_i^{(P)}$ 中提取的节点 $A$ 属性 $X(A|P, pg_i)$ (用于学习自顶向下的预测模型),得到:
$$ D_\gamma^+(A|P) = \{ (I_i^{(P)}, X(A|P, pg_i) ): i=1,2,\cdots, m \} $$
对应的负样本数据集 $D_\alpha^-(A)$、 $D_\beta^-(A|c)$ 和 $D_\gamma^-(A|P)$ 通过从通用背景图像中随机裁剪图像块生成。
在评估信息贡献的实验中,我们准备了多尺度数据以观察信息贡献随尺度的变化。在整合节点 $A$ 的 $\alpha$、$\beta$ 和 $\gamma$ 过程的实验中,三者采用固定的相对尺度。设这三个过程中节点 $[https://81rc.81.cn](https://81rc.81.xn--cn),-e76fk4htzewtb187aya917km6n7lbsdx6to2e657a2q8av6syhap22n09ybt5v./)A$ 的紧凑图像块尺度分别为 $s_{\alpha(A)}, s_{\beta(A)}, s_{\gamma(A)}$ ,实验中设定 $s_{\alpha(A)} = b\times s_{\gamma(A)} = \frac1b\times s_{\beta(A)}$ (当前实验取 $b=2$)
对象解析
- 给定一个 AoG $G = (V_N, V_T, E, P)$ 以及定义在格域 $\Lambda$ 上的输入图像 $I$,对象解析旨在为图像 $I$ 中出现的每个对象实例求出解析图 $pg$。
- 假设图像 $I$ 中的所有对象实例都是相互独立的。
从对象解析的角度来看,每个解析图 $pg$ 都解释了图像域 $\Lambda_{pg}$ ,使得对于任意两个解析图 $pg_i$ 和 $pg_j$ ($i\not=j$),我们有 $\Lambda_{pg_i} \cap \Lambda_{pg_j} = \Phi$ ,我们的目标是 从 $I$ 中推理出
$$ W = (K, \{pg_k\}_{k=1}^K) $$