1 Denoising Diffusion Probabilistic Models
论文地址:Denoising Diffusion Probabilistic Models
- Diffusion Probabilistic Model 是一个可参数化的马尔可夫链,通过变分推理训练,在有限时间内生成与数据匹配的样本。
- Transitions of this chain are learned to reverse a diffusion process, which is a Markov chain that gradually adds noise to the data in the opposite direction of sampling until signal is destroyed.
- 当 diffusion 由少量高斯噪声组成时,将 sampling chain transitions 设置为条件高斯分布,从而允许实现特别简单的神经网络的参数化。
1.1 background
Diffusion Model:
- latent variable models 潜变量模型
形式:
$$ p_\theta := \int p_\theta (\mathbf{x}_{0:T}) \text{d} \mathbf{x}_{1:T} $$
$\mathbf{x}_t, ..., \mathbf{x}_T$ 与 数据 $\mathbf{x}_0 \sim q(\mathbf{x}_0)$ 具有相同维度的潜在变量。
- $p_\theta(\mathbf{x}_0)$ 为边缘概率分布。
$p_\theta(\mathbf{x}_{0:T})$ 是联合概率分布,表示从噪声 $\mathbf{x}_T$ 开始经过一系列步骤生成 $\mathbf{x}_0$ 的整个过程的概率。
这个过程被建模成马尔可夫链,每个时刻 $\mathbf{x}_t$ 的生成只依赖于上一个时刻 $\mathbf{x}_{t+1}$ .
积分是对 $\mathbf{x}_{1:T}$ 进行积分,消除中间变量,得到只关于 $\mathbf{x}_0$ 的边缘分布 $p_\theta(\mathbf{x}_0)$ 。
通过积分消除之间变量,就得到从噪声 $\mathbf{x}_T$ 到 目标数据 $\mathbf{x}_0$ 这一个过程生成数据 $\mathbf{x}_0$ 的概率分布。
联合分布 $p_\theta(\mathbf{x}_{0:T})$ ,称为 reverse process,反向过程。
定义为一个马尔可夫链,从 $p(\mathbf{x}_T) = \mathcal{N}(\mathbf{x}_T; 0,\mathbf{I})$ 开始:
$$ p_\theta(\mathbf{x}_{0:T}):= p(\mathbf{x}_T)\prod_{t=1}^T p_\theta(\mathbf{x}_{t-1}|\mathbf{x}_t), p_\theta(\mathbf{x}_{t-1}|\mathbf{x}_t) := \mathcal{N}(\mathbf{x}_{t-1}; \mu_\theta(\mathbf{x}_t, t), \sum_\theta (\mathbf{x}_t, t)) $$
近似后验分布 $q(\mathbf{x}_{1:T}|\mathbf{x}_0)$,称为 正向过程 forward process 或 diffusion process。
定义为一个马尔可夫链,根据方差调度 $\beta_1, ..., \beta_T$ 逐步向数据添加高斯噪声。
$$ q(\mathbf{x}_{1:T}|\mathbf{x}_0) := \prod^T_{t=1}q(\mathbf{x}_t|\mathbf{x}_{t-1}),q(\mathbf{x}_t|\mathbf{x}_{t-1}):= \mathcal{N}(\mathbf{x}_t;\sqrt{1-\beta_t}\mathbf{x}_{t-1}, \beta_{t}\mathbf{I}) $$

训练是通过优化负对数似然的常规变分下界来进行的:
$$ \mathbb{E}[-\log p_\theta (\mathbf{x}_0)] \leq \mathbb{E}_{q}\bigg[-\log \cfrac{p_\theta(\mathbf{x}_{0:T})}{q(\mathbf{x}_{1:T}|\mathbf{x}_0)}\bigg] = \mathbb{E}_{q}\bigg[-\log p(\mathbf{x}_T)-\sum_{t\geq 1}\log \cfrac{p_\theta(\mathbf{x}_{t-1}|\mathbf{x}_t)}{q(\mathbf{x}_{t}|\mathbf{x}_{t-1})}\bigg] =: L $$
- 正向过程的方差 $\beta_t$ 可以通过重参数化来学习,或者作为超参数保持不变。
- 反向过程的表达能力在一定程度上在 $p_\theta(\mathbf{x}_{t-1}|\mathbf{x}_t)$ 中选择高斯条件分布来确保,因为当 $\beta_t$ 较小时,正向和反向过程具有相同的函数形式。
正向过程,允许在任意时间步 $t$ 以封闭形式对 $\mathbf{x}_t$ 进行采样:使用记号 $\alpha_t = 1-\beta_t$ 和 $\bar{\alpha}_t := \prod^t_{s=1} \alpha_s$ ,有:
$$ q(\mathbf{x}_t|\mathbf{x}_0) = \mathcal{N}(\mathbf{x}_t; \sqrt{\bar{\alpha}_t}\mathbf{x}_0, (1-\bar{\alpha}_t)\mathbf{I}) $$
因此,通过使用随机梯度下降来优化损失函数 $L$ 的随机项,可以实现高效的训练。进一步的改进来自于通过重写 $L$ 来以减少方差
$$ \begin{equation} \mathbb{E}_q \left[ \underbrace{{D_{KL} \left( q(\mathbf{x}_T | \mathbf{x}_0) \| p(\mathbf{x}_T) \right)}}_{L_T} + \sum_{t > 1} \underbrace{{D_{KL} \left( q(\mathbf{x}_{t-1} | \mathbf{x}_t, \mathbf{x}_0) \| p_\theta (\mathbf{x}_{t-1} | \mathbf{x}_t) \right)}}_{L_{t-1}} - \underbrace{\log p_\theta (\mathbf{x}_0 | \mathbf{x}_1)}_{L_0} \right] \end{equation} $$
上述公式利用 KL散度 将 $p_{\theta}(\mathbf{x}_{t-1} | \mathbf{x}_t)$ 直接与正向过程的后验分布进行比较,当条件为 $\mathbf{x}_0$ 时,这些分布是易于处理的:
$$ q(\mathbf{x}_{t-1} | \mathbf{x}_t, \mathbf{x}_0) = \mathcal{N}(\mathbf{x}_{t-1}; \tilde{\mu}_t(\mathbf{x}_t, \mathbf{x}_0), \tilde{\beta}_t \mathbf{I}) $$
其中:
$$ \tilde{\mu}_t(\mathbf{x}_t, \mathbf{x}_0) \triangleq \frac{\bar{\alpha}_{t-1}}{\bar{\alpha}_t} \mathbf{x}_0 + \frac{\alpha_t (1 - \bar{\alpha}_{t-1})}{\bar{\alpha}_t} \mathbf{x}_t,\tilde{\beta}_t \triangleq \frac{1 - \bar{\alpha}_{t-1}}{1 - \bar{\alpha}_t} \beta_t. $$
KL divergence,KL 散度:$D_{KL}(P\| Q) = \sum_i P(i) \cfrac{P(i)}{Q(i)}$ ,计算 P 和 Q 之间的差异。
1.2 Diffusion models and denoising autoencoders
- 忽略正向过程方差 $\beta_t$ 是可学习这一事实,通过重新参数化固定它们为常熟。在 DM 的实现中,近似后验分布 $q$ 没有可学习的参数,所以 $L_T$ 在训练期间是一个常数,可以忽略。
训练过程:
- repeat 重复
- 采样一张 图像$x_0$,$x_0$ 代表干净的图
- 从一个较大数的范围内 采样 一个数字 $t$ 出来
- $\epsilon$ 是从正态分布中采样:$\epsilon\sim \mathcal{N}(0,\mathbf{I})$
采取梯度下降法 $ \nabla_{\theta} \Vert \epsilon - \epsilon_{\theta}(\sqrt{\bar{\alpha}_t}x_0+\sqrt{1-\bar{\alpha}_t}\epsilon, t)\Vert$
- $\epsilon$ :target noise
- $\epsilon_{\theta}$:noise predictor
- t 越大,$\bar{\alpha}_t$ 越小,离 $x_0$ 越远,离 target noise $\epsilon$ 越近
采样过程:
- 从正态分布 $\mathcal{N}(0,\mathbf{I})$ 采样一个噪声图像 $\mathbf{x}_T$
运行 T 次,t = T, ..., 1 do
- 如果 t>1,则采样一个噪声 $\mathbf{z}\sim \mathcal{N}(0,\mathbf{I})$ ,t=1设置 $\mathbf{z} = \mathbf0$
$\mathbf{x}_{t-1} = \cfrac{1}{\sqrt{\alpha}_t}\big(\mathbf{x}_t - \cfrac{1-\alpha_t}{\sqrt{1-\bar\alpha_t}}\epsilon_{\theta}(\mathbf{x}_t, t)\big) + \sigma_t \mathbf{z}$
- $\mathbf{x}_t$ 是上一个步骤产生的图像
- $\epsilon_{\theta}$ 是 noise predicter 输出的 noise
假设图像数据由整数组成,范围为 {0, 1, ..., 255} 并线性缩放到 [-1, 1]。
确保神经网络 反向过程 在从标准正态先验 $p(\mathbf{x}_T)$ 开始的一致缩放输入上运行。
为了获得离散对数似然值,将反向过程的最后一项设置为独立的离散解码器,该解码器从高斯分布 $N(\mathbf{x}; \mu_\theta (\mathbf{x}_1, 1), \sigma^2_1 I)$ 导出:
$$ \begin{aligned} p_\theta (\mathbf{x}_0 | \mathbf{x}_1) = \prod_{i=1}^{D} \int_{\delta_- (x_0^i)}^{\delta_+ (x_0^i)} N(x; \mu_\theta^i (\mathbf{x}_1, 1), \sigma^2_1) \mathrm{d}x \\ \delta_+(x) = \begin{cases} \infty & \text{if } x = 1 \\ x + \frac{1}{255} & \text{if } x < 1 \end{cases} \quad \delta_-(x) = \begin{cases} -\infty & \text{if } x = -1 \\ x - \frac{1}{255} & \text{if } x > -1 \end{cases} \end{aligned} $$
其中 $D$ 是数据维度,$i$ 上标表示提取一个坐标。
有益于样本质量(并且更容易实施)的是,在以下变分界的变体上进行训练:
$$ L_{\text{simple}}(\theta) := \mathbb{E}_{t,x_0,\epsilon}\left[\|\epsilon-\epsilon_\theta(\sqrt{\bar{\alpha}_t}\mathbf{x}_0+\sqrt{1-\bar{\alpha}_t}\epsilon,t)\|^2\right] $$
1.3 Experiments
- 相比于固定方差来说,学习反向过程的方差导致训练不稳定且样本质量较差。
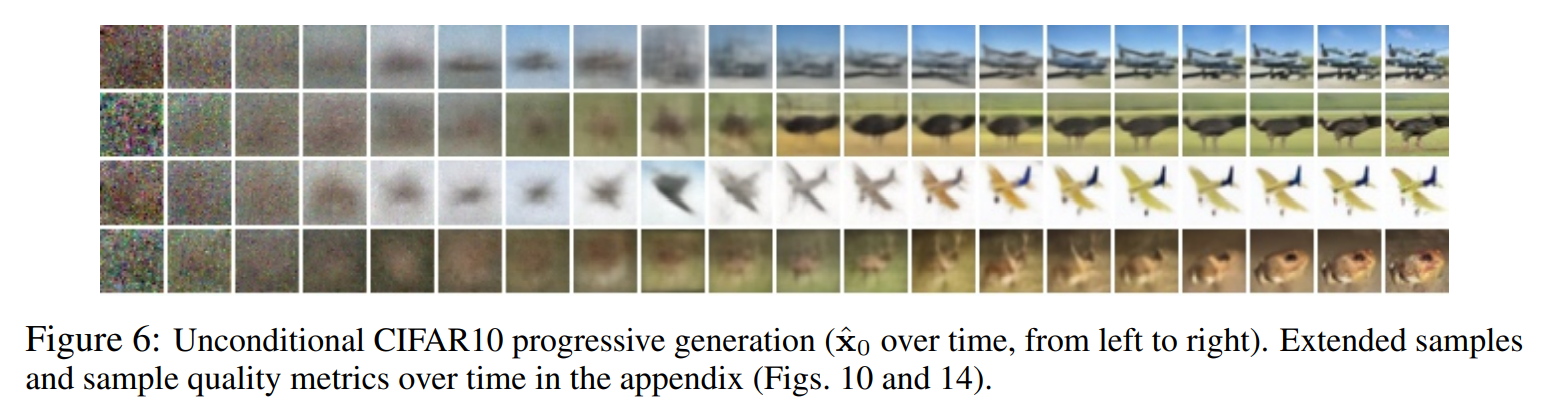
图像生成过程:图像生成时,会首先生成大尺度特征,再逐步生成图像细节。如下图所示,最初是随机噪声(最左侧),随着时间步长的增加,逐渐看到模糊的整体图像,最后细节越来越清晰。
- 插值 (Interpolation):可以在潜空间中对 源图像 $\mathbf{x}_0, \mathbf{x}_0' \sim q(\mathbf{x}_0)$ 进行插值,使用 $q$ 作为随机编码器,得到 $\mathbf{x}_t, \mathbf{x}_t' \sim q(\mathbf{x}_t | \mathbf{x}_0)$,然后将线性插值的潜变量 $\bar{\mathbf{x}}_t = (1 - \lambda) \mathbf{x}_0 + \lambda \mathbf{x}_0'$ 通过反向过程解码回图像空间,即 $\bar{\mathbf{x}}_0 \sim p(\mathbf{x}_0 | \bar{\mathbf{x}}_t)$。实际上,我们使用反向过程来去除线性插值后的源图像中被污染的部分。我们将噪声固定在不同的$\lambda$ 值上,以使得 $\mathbf{x}_t$ 和 $\mathbf{x}_t'$ 保持不变。反向过程生成了高质量的重建图像,并实现了平滑的插值,在插值过程中变化了诸如姿势、肤色、发型、表情和背景等属性,但不会改变是否佩戴眼镜。
1.4 DDPM U-Net
参考:https://zhuanlan.zhihu.com/p/655568910 和 https://nn.labml.ai/diffusion/ddpm/unet.html
- DDPM U-Net 的输入是 某个时刻的图片 $x_t$ 和 用于表示该时刻的 $t$ 向量,输出是对 $t$ 时刻的噪声预测。
- DDPM U-Net 是典型的 Encoder-Decoder 结构。在 Encoder 中,压缩图片,逐步提取图片特征,在 Decoder 中,逐步还原图片大小。由于压缩图片会导致丢失信息,因此做 decoder 还原时,会拼接 encoder 层(相同层次)输出的特征图,以减少信息损失。
1.4.1 基本部件
- 激活函数:Swish 激活函数:$x \cdot \sigma(x)$
ResidualBlock:残差块。块的构成:卷积层(GroupNorm → Swish 激活层 → Conv2d 卷积),时间嵌入层 time_emb(单个全连接层):
前向过程:conv(x) + time_emb(t) → h, conv(h) + shortcut(x) → output (conv -> 加入时间向量 -> conv -> 跳跃链接)
AttentionBlock:和 transformer 的 multi_head attention 相似。基本构成:norm (GroupNorm), projection (单个全连接层), output层(单个全连接层)
前向过程:x (重塑形状后) → 先把 x 映射到 n_heads k_dims 3 的维度空间上,再分解映射到 q, k, v 上 → attn = q·k + 归一化 → res = attn ·v, 重塑形状 → output(res) +x → 恢复原来的形状输出。
引入 attention可以使得 网络学习输入图像中像素之间的关系。
- DownBlock:编码器,DownBlock = ResidualBlock + AttentionBlock
- MiddleBlock:位于 U-Net 最底层。MiddleBlock = ResidualBlock + AttentionBlock + ResidualBlock
- UpBlock:解码器,UpBlock = ResidualBlock + AttentionBlock
- Upsample:上采样,通过反卷积
ConvTranspose2d实现。 - Downsample:下采样,通过单个卷积层实现。
Time-Embedding :将把整型t,以Transformer位置编码的方式,映射成向量:
$$ PE_{t,i}^{(1)} = \sin(\cfrac{t}{10000^{\frac{i}{d-1}}})\\ PE_{t,i}^{(2)} = \cos(\cfrac{t}{10000^{\frac{i}{d-1}}}) $$
$d$ 是 输出维度的 1/8。
1.4.2 U-Net的总体框架
前向过程:
def forward(self, x: torch.Tensor, t: torch.Tensor):
t= self.time_emb(t) # 时间向量
x= self.image_proj(x) # 图像映射
# Encoder
h= [x]
for m in self.down:
x= m(x, t) # 每次通过 m(x,t) 处理,生成新的 feature map x
# m = DownBlock
# m = Downsample
h.append(x) # h 列表保存了每一层的输出,供解码器使用
# Middle
x= self.middle(x, t)
# Decoder
for m in self.up:
if isinstance(m, Upsample): # 上采样操作
x= m(x, t)
# m(x,t) = Upsample
else:
s= h.pop() # 取出相同层的编码器的输出 s
x= torch.cat((x, s), dim= 1) # 拼接
x= m(x, t) # 经过 m(x,t) 得到输出用于更上一层的模型
# m = UpBlock
return self.final(self.act(self.norm(x)))2 Denoising Diffusion Implicit Models
论文地址:Denoising Diffusion Implicit Models
DDPM,需要模拟马尔可夫链的许多步骤才能生成样本。DDIM中,使用一类非马尔可夫扩散过程来泛化 DDPM,这些过程可以走向相同的训练目标。这些非马尔可夫过程可以对应于确定性的生成过程,从而生成能更快地生成高质量样本的隐式模型。DDIM 是隐式概率模型,并且与 DDPM 密切相关,因为它们使用相同的目标函数进行训练。

2.1 Background
给定来自数据分布 $q(x_0)$ 的样本,学习近似于 $q(x_0)$ 且易于采样的模型分布 $p_\theta(x_0)$ 。去噪扩散概率模型 DDPM,是一下形式的潜在变量模型:
$$ p_\theta(x_0) = \int_\theta p_\theta (x_{0:T}) \text{d}x_{1:T},\text{ where } p_\theta(x_{0:T}) := p_\theta(x_T)\prod^T_{t=1} p_\theta^{(t)}(x_{t-1}|x_t) $$
其中,$x_1, ..., x_T$ 是与 $x_0$ 位于同一样本空间中的潜在变量 $\mathcal{X}$ 。参数 $\theta$ 是通过最大化变分下限来学习拟合数据分布 $q(x_0)$ 的:
$$ \max_\theta \mathbb{E}_{q(x_0)}[\log p_\theta (x_0)] \leqslant \max_\theta \mathbb{E}_{q(x_0, x_1, ..., x_T)} [\log p_\theta(x_{0:T}) - \log q(x_{1:T}|x_0)] $$
其中,$q(x_{1:T}|x_0)$ 是潜在变量的一些推理分布。DDPM 通过固定(而非可训练)推理程序 $q(x_{1:T}|x_0)$ 来学习的。
$$ q(x_{1:T} | x_0) := \prod_{t=1}^{T} q(x_t | x_{t-1}), \text{ where } q(x_t | x_{t-1}) := \mathcal{N}\left(\sqrt{\frac{\alpha_t}{\alpha_{t-1}}}x_{t-1}, \left(1 - \frac{\alpha_t}{\alpha_{t-1}}\right)I\right) $$
由于采样过程(从 $x_0$ 到 $x_T$ )具有自回归性质,因此这被称为前向过程。将隐变量模型 $p_\theta(x_{0:T})$ 称为生成过程,它是从 $x_T$ 到 $x_0$ 采样的马尔可夫链。前向过程的一个特殊的性质是:
$$ q(x_t|x_0) := \int q(x_{1:t}|x_0) \text{d}x_{1:(t-1)} = \mathcal{N}(x_t; \sqrt{\alpha_t}x_0, (1-\alpha_t)I) $$
$x_t$ 表示为 $x_0$ 和 噪声变量 $\epsilon$ 的线性组合:
$$ x_t = \sqrt{\alpha_t}x_0 + \sqrt{1-\alpha_t} \epsilon,\text{ where }\epsilon \sim \mathcal{N}(0, \mathbf{I}) $$
训练目标:
$$ L_{\gamma}(\epsilon_\theta) := \sum_{t=1}^{T} \gamma_t \mathbb{E}_{x_0 \sim q(x_0), \epsilon_t \sim \mathcal{N}(\boldsymbol{0}, \boldsymbol{I})} \left[ \| \epsilon_\theta^{(t)} (\sqrt{\alpha_t} x_0 + \sqrt{1 - \alpha_t} \epsilon_t) - \epsilon_t \|_2^2 \right] $$
2.2 Variational Inference For Non-Markovian Forward Processes
非马尔可夫前向过程的变分推断
2.2.1 非马尔可夫前向过程
考虑一个推理分布系列 $\mathcal{Q}$ ,由实数向量 $\sigma \in \mathbb{R}^T_{\geq 0}$ 索引:
$$ q_\sigma (x_{1:T}|x_0) = q_\sigma (x_T|x_0)\prod_{t=2}^T q_\sigma(x_{t-1}|x_t, x0) $$
$q(x_{t-1}|x_t, x_0)$ 意味着给定 $x_0$ 和 $x_t$ 生成 $x_{t-1}$ 的分布。
$q(x_T|x_0) = \mathcal{N}(\sqrt{\alpha_T}x_0, (1-\alpha_T)\mathbf{I})$ ,因此有 $x_t = \sqrt{\alpha_t}x_0 + \sqrt{1-\alpha_t} \epsilon_t,\text{ where }\epsilon_t \sim \mathcal{N}(0, \mathbf{I})$
正态分布的性质:$\mathcal{N}(0, \delta_1^2) + \mathcal{N}(0, \sigma_2^2) = \mathcal{N}(0, \sigma_1^2 + \sigma_2^2)$
$$ \sqrt{1-\alpha_{t-1} - \sigma_t^2} \epsilon_t \sim N(0, 1-\alpha_{t-1} - \sigma_t^2) \\ \sigma_t \epsilon \sim \mathcal{N}(0, \sigma_t^2) \\ \sqrt{1-\alpha_{t-1}}\epsilon_{t-1} \sim \mathcal{N}(0, 1-\alpha_{t-1}) $$
同时有 $\epsilon_t = \cfrac{x_t - \sqrt{\alpha_t}x_0}{\sqrt{1-\alpha_t}}$
所以有:
$$ \begin{aligned} x_{t-1} & = \sqrt{\alpha_{t-1}}x_0 + \sqrt{1-\alpha_{t-1}} \epsilon_{t-1}\\ & = \sqrt{\alpha_{t-1}}x_0 + \sqrt{1-\alpha_{t-1} - \sigma_t^2} \epsilon_{t} + \sigma_t \epsilon \\ & = \sqrt{\alpha_{t-1}}x_0 + \sqrt{1-\alpha_{t-1} - \sigma_t^2} \cfrac{x_t - \sqrt{\alpha_t}x_0}{\sqrt{1-\alpha_t}} + \sigma_t \epsilon \end{aligned} $$
因此 $q_\sigma(x_{t-1}|x_t, x_0) = \mathcal{N}(\sqrt{\alpha_{t-1}}x_0 + \sqrt{1-\alpha_{t-1} - \sigma_t^2} \cfrac{x_t - \sqrt{\alpha_t}x_0}{\sqrt{1-\alpha_t}}, \sigma_t^2\mathbf{I})$
前向过程可以从贝叶斯公式得出:
$$ q_\sigma(x_t|x_{t-1}, x_0) = \cfrac{q_\sigma (x_{t-1}|x_t, x_0)q_\sigma(x_t|x_0)}{q_\sigma(x_{t-1}|x_0)} $$
正向过程不再是马尔可夫过程,因为每个 $x_t$ 都可能依赖于 $x_{t-1}$ 和 $x_0$ 。
2.2.2 生成过程和统一变分推理目标
定义一个可训练的生成过程 $p_\theta(x_{0:T})$ ,其中每个 $p_\theta^{(t)}(x_{t-1}|x_t)$ 都利用了 $q_\sigma(x_{t-1}|x_t, x_0)$ 的知识。直观地说:给定一个噪声的观测值 $x_t$ ,我们首先对相应的 $x_0$ 做出预测,然后使用它通过我们定义的反向条件分布 $q_\sigma(x_{t-1}|x_t, x_0)$ 获得样本 $x_{t-1}$ 。
对于 $x_0\sim q(x_0)$ 和 $\epsilon_t \sim \mathcal{N}(\mathbf{0},\mathbf{I})$,$x_t$ 可以使用 $x_t = \sqrt{\alpha_t}x_0 + \sqrt{1-\alpha_t} \epsilon_t,\text{ where }\epsilon_t \sim \mathcal{N}(0, \mathbf{I})$ 得到。然后,模型 $\epsilon_\theta^{(t)}(x_t)$ 尝试根据 $x_t$ 预测 $\epsilon_t$ ,从而根据公式得到 $x_0$。$x_t$ 对 $x_0$ 的预测:
$$ f_\theta^{(t)}(x_t):=\cfrac{x_t - \sqrt{1-\alpha_t}\cdot \epsilon_\theta^{(t)}(x_t)}{\sqrt{\alpha_t}} $$
可以用固定的先验分布 $p_\theta(x_T) = \mathcal{N}(\mathbf{0},\mathbf{I})$ 和
$$ p_\theta^{(t)}(x_{t-1}|x_t) = \begin{cases} \mathcal{N}(f_\theta^{(1)}(x_1), \sigma_1^2 \mathbf{I}) & \text{if } t=1\\ q_\sigma(x_{t-1}|x_t, f_\theta^{(t)}(x_t)) & \text{otherwise} \end{cases} $$
定义生成过程(反向过程)。$q_\sigma(x_{t-1}|x_t, f_\theta^{(t)}(x_t))$ 由
$ q_\sigma(x_{t-1}|x_t, x_0) = \mathcal{N}(\sqrt{\alpha_{t-1}}x_0 + \sqrt{1-\alpha_{t-1} - \sigma_t^2} \cfrac{x_t - \sqrt{\alpha_t}x_0}{\sqrt{1-\alpha_t}}, \sigma_t^2\mathbf{I}) $
定义,其中 $x_0$ 由 $f_\theta^{(t)}(x_t)$ 代替。对于 $t=1$ 的情况,添加一些高斯噪声(具有协方差 $\sigma_1^2 \mathbf{I}$),以确保生成过程在任何地方都受到支持。
由于:
$$ q_\sigma (x_{1:T}|x_0) = q_\sigma (x_T|x_0)\prod_{t=2}^T q_\sigma(x_{t-1}|x_t, x0)\\ p_\theta(x_{0:T}) := p_\theta(x_T)\prod^T_{t=1} p_\theta^{(t)}(x_{t-1}|x_t) $$
得到变分推理目标:
$$ \begin{aligned} J_\sigma(\epsilon_\theta) & := \mathbb{E}_{x_{0:T} \sim q_\sigma(x_{0:T})}[\log q_{\sigma}(x_{1:T}|x_0) - \log p_\theta(x_{0:T})]\\ & = \mathbb{E}_{x_{0:T} \sim q_\sigma(x_{0:T})}\bigg[ \log q_\sigma (x_T|x_0) + \sum^T_{t=2}q_\sigma(x_{t-1}|x_t, x_0) - \sum^T_{t=1} \log p_\theta^{(t)}(x_{t-1}|x_t) - \log p_\theta(x_T) \bigg] \end{aligned} $$
根据 $J_\sigma$ 的定义,似乎对于每个 $\sigma$ 的选择都必须训练一个不同的模型,因为它对应于不同的训练变分目标(和不同的生成模型),但是对于某些权重 $\gamma$ ,$J_\sigma$ 等同于 $L_\gamma$ :
定理1:对于$∀\sigma > \mathbf{0}$,有$∃\gamma \in \mathbb{R}_{>0}^T, C\in \mathbb{R}$,使得 $J_\sigma = L_{\gamma} + C$
变分目标 $L_\gamma$ 的特殊之处在于,如果模型 $\epsilon_\theta^{(t)}(x_t)$ 的参数 $\theta$ 在不同的 $t$ 之间共享,则 $\epsilon_\theta$ 的最优解将不依赖于权重 $\gamma$ (因为全局最优是通过分别最大化总和中的每个项来实现的)。因此使用 $L_\mathbf{1}$ 作为 DDPM 中变分下限的替代目标函数是合理的,同时,$J_\sigma$ 等同于定理1中的某个 $L_\gamma$ ,因此 $J_\sigma$ 的最优解也与 $L_\mathbf{1}$ 的最优解相同。
2.3 Sampling From Generalized Generative Processes
基本上可以使用预训练的 DDPM 模型作为新目标的解决方案,并通过更改 $\sigma$ 来专注于找到更适合我们需求的生成样本的生成过程。
2.3.1 Denosing Diffusion Implicit Models
由2.2.2 的内容,可以把采样过程定义为:(从样本 $x_t$ 生成 $x_{t-1}$ 的过程)
$$ \begin{aligned} x_{t-1} & = \sqrt{\alpha_{t-1}}x_0 + \sqrt{1-\alpha_{t-1} - \sigma_t^2} \epsilon_{t} + \sigma_t \epsilon\\ & = \sqrt{\alpha_{t-1}}\underbrace{\bigg(\cfrac{x_t - \sqrt{1-\alpha_t}\cdot \epsilon_\theta^{(t)}(x_t)}{\sqrt{\alpha_t}}\bigg)}_{\text{“predicted } x_0 \text{”}} + \underbrace{\sqrt{1-\alpha_{t-1} - \sigma_t^2} \epsilon_\theta^{(t)}(x_t)}_{\text{“direction pointing to } x_t \text{”}} + \underbrace{\sigma_t \epsilon_t}_{\text{random noise}} \end{aligned} $$
其中,$\epsilon_t \sim \mathcal{N}(\mathbf{0},\mathbf{I})$ 是与 $x_t$ 无关的标准高斯噪声,我们定义 $\alpha_0 := 1$ 。$\sigma$ 值的不同选择会导致不同的生成过程,同时使用相同的模型 $\epsilon_\theta$ ,因此无需重新训练模型。当 $\sigma_t = \sqrt{(1-\alpha_{t-1})/(1-\alpha_t)}\sqrt{1-\alpha_t/\alpha_{t-1}}$ 适用于所有 $t$ 时,前向过程变为马尔可夫过程,而生成过程变为 DDPM。
【源代码】通用的降噪过程:
def generalized_steps(x, seq, model, b, **kwargs):
"""
执行通用扩散步骤,用于逐渐从噪声图像恢复纯净图像。
Args:
x: 输入数据,通常为一个含有噪声的图像张量。
seq: 要执行的扩散步骤序列,可以是自定义的序列。
model: 用于去噪的模型,该模型可以预测噪声图像中的噪声。
b: 噪声调度参数,控制着噪声添加到图像中的速率。
kwargs: 其他可选参数,例如 eta 参数可以控制扩散过程中的噪声水平。
Returns:
xs: 列表,包含每个扩散步骤的噪声图像张量。
x0_preds: 列表,包含每个扩散步骤估计的纯净图像张量。
"""
with torch.no_grad():
n = x.size(0) # 获取批处理大小 (number of elements in the first dimension)
seq_next = [-1] + list(seq[:-1]) # 下一个时间步序列
x0_preds = [] # 列表,用于存储估计的纯净图像
xs = [x] # 初始放入输入图像
for i, j in zip(reversed(seq), reversed(seq_next)):
t = (torch.ones(n) * i).to(x.device) # 当前时间步
next_t = (torch.ones(n) * j).to(x.device) # 下一个时间步
at = compute_alpha(b, t.long()) # 计算当前时间步的 alpha 值
at_next = compute_alpha(b, next_t.long()) # 计算下一个时间步的 alpha 值
xt = xs[-1].to('cuda')
et = model(xt, t) # 使用模型预测当前噪声图像中的噪声
x0_t = (xt - et * (1 - at).sqrt()) / at.sqrt() # 根据预测的噪声和当前时间步的 alpha 值,估计纯净图像 x0
x0_preds.append(x0_t.to('cpu'))
c1 = (
kwargs.get("eta", 0) * ((1 - at / at_next) * (1 - at_next) / (1 - at)).sqrt()
)
c2 = ((1 - at_next) - c1 ** 2).sqrt() # 计算 et 的参数
xt_next = at_next.sqrt() * x0_t + c1 * torch.randn_like(x) + c2 * et
xs.append(xt_next.to('cpu'))
return xs, x0_preds2.3.2 Accelerated Generation Processes
在前面的部分中,生成过程被视为逆过程的近似;由于正向过程有 $T$ 个步骤,因此生成过程也被迫采样 $T$ 个步骤。但是,由于只要 $q_\sigma(x_t | x_0)$ 固定,去噪目标 $L_1$ 就不依赖于特定的正向过程,我们也可以考虑长度小于 $T$ 的前向过程,这可以加速相应的生成过程,而无需训练不同的模型。
让我们考虑不在所有潜在变量 $x_{1:T}$ 上定义的前向过程,而是在子集 $\{x_{\tau_1}, \ldots, x_{\tau_S}\}$ 上定义的前向过程,其中 $\tau$ 是长度为 $S$ 的 $[1,\ldots,T]$ 的递增子序列。具体而言,我们定义 $x_{\tau_1}, \ldots, x_{\tau_S}$ 上的顺序前向过程,使得 $q(x_{\tau_i} | x_0) = N(\sqrt{\alpha_{\tau_i}} x_0, (1 - \alpha_{\tau_i}) I)$ 与“边缘”相匹配。生成过程现在根据 reversed($\tau$) 对潜在变量进行采样,我们将此称为(采样)轨迹。当采样轨迹的长度远小于 $T$ 时,由于采样过程的迭代性质,我们可能会显著提高计算效率。
使用与第3节类似的论据,我们可以证明使用 $L_1$ 目标训练的模型是合理的,因此训练中不需要进行任何更改。我们表明,只需对 采样过程 中的更新进行轻微更改即可获得新的、更快的生成过程,这适用于 DDPM、DDIM 以及2.2.2中所有生成过程。